Researchers
Karen Willcox – Professor and Director of the Oden Institute for Computational Engineering and Sciences
Patrick Blonigan, Senior Member of the Technical Staff, Sandia National Labs
Julie Pham – Graduate Research Assistant
Solving the inverse problem with Scientific Machine Learning (SciML)
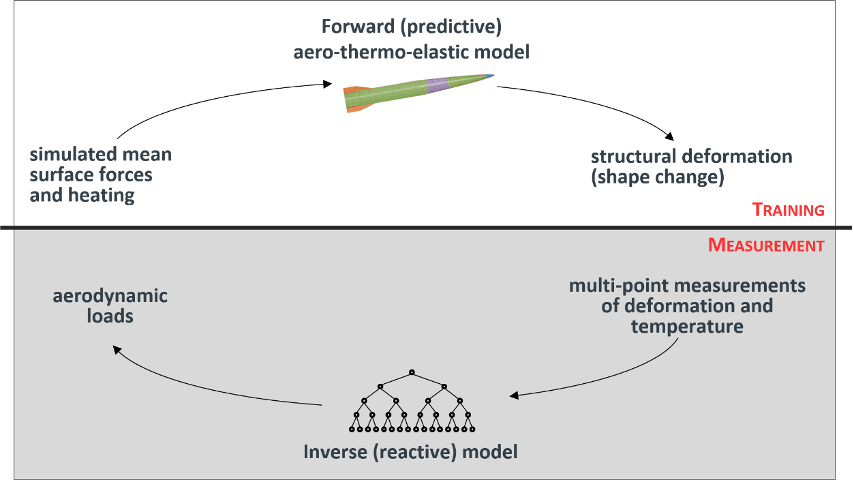
The FAST methodology relies on Scientific Machine Learning (SciML) and a high-fidelity model of the vehicle structural response to produce an inverse map that can rapidly predict aerodynamic loads. The task of inferring aerodynamic loads from measurements of structural deformation is characteristically defined as an inverse problem. Inverse problems are typically computationally expensive and require a significant amount of time to solve. However, the FAST sensing technique requires a rapid evaluation of the inverse solution so that the inferred quantities of interest (QoIs) can inform the guidance and control system of the hypersonic vehicle in real-time. For real-time tractability, we aim to use scientific machine learning (SciML) to train an inverse map that can rapidly predict aerodynamic QoIs from on-board measurements of structural deformation.
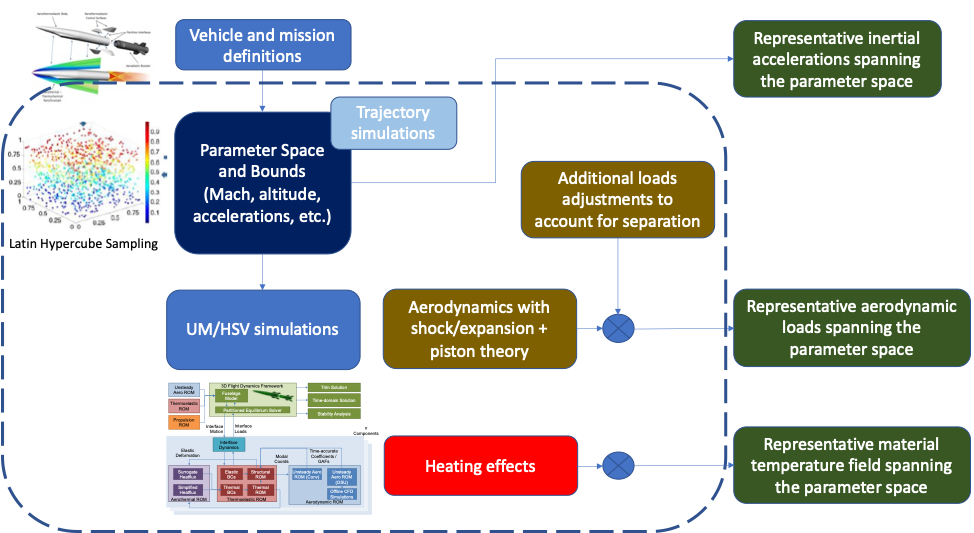
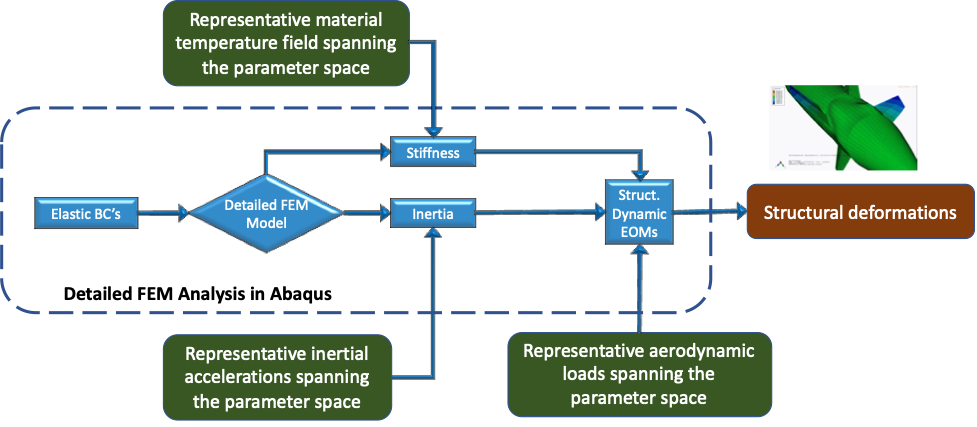
As shown in the figure below, using SciML to develop the inverse map requires significant amounts of training data. To produce the necessary training data, we employ multi-physics and multi-fidelity models to produce forward simulation snapshots over a range of hypersonic flight conditions. The inputs to the forward model are parameterizations of distributed aerodynamic loads, and the outputs are the measurements of structural deformation. To increase robustness to the noisy nature of the measurements, the training dataset is augmented by adding synthetic noise realizations to the snapshots. With a large training set of physics-informed training samples, machine learning algorithms can be used to learn the inverse map from measurements to QoIs.
Many of the open questions involve sensor requirements, QoI parameterizations, aerothermoelastic modeling methods, and machine learning methods that can achieve a well-posed, robust, and computationally fast inverse mapping. The results will be validated using benchtop and wind tunnel experiments. Successful development of this strategy will make the FAST technique a novel advancement in the predictive capabilities for hypersonics.
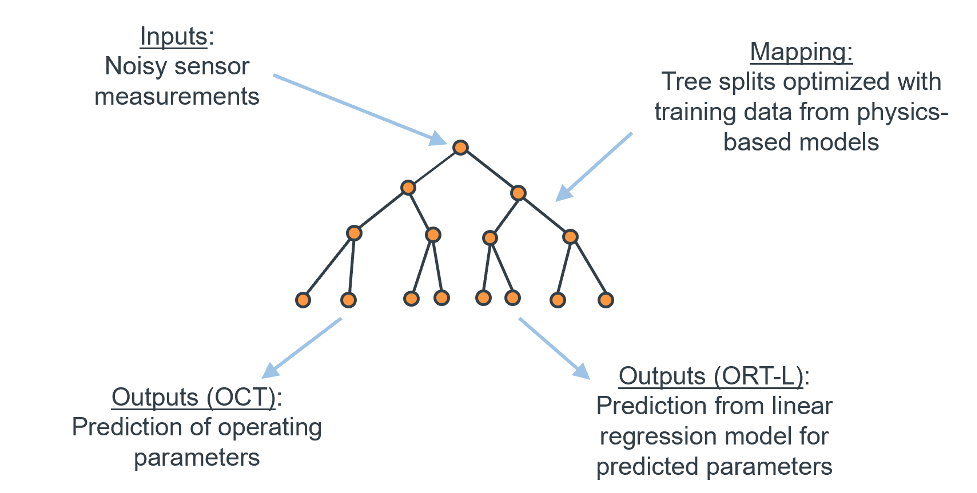
SciML framework using optimal classification trees (OCT) and/or optimal regression trees with linear models (ORT-L) to predict quantities of interest